基于视觉和毫米波雷达的多传感器融合策略研究
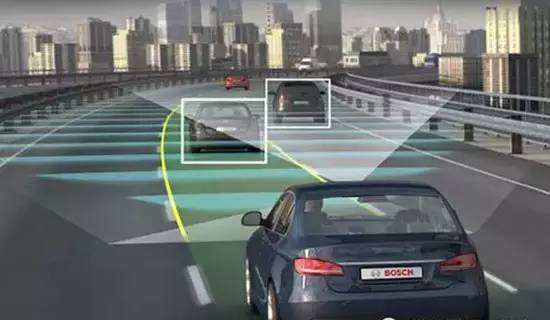
ADAS(高级驾驶辅助系统)是一个主动安全功能集成控制系统,利用雷达、摄像头等传感器采集周边环境数据,进行静态、动态物体的识别、跟踪、控制系统结合地图数据进行行为决策,使驾驶者觉察可能发生的危险,必要情况下直接控制车辆以避免碰撞,可有效提升驾驶安全性、舒适性。在此基础上,可以说ADAS是实现自动驾驶的前提。

ADAS
ADAS产业分上游、中游及下游市场,主要涉及芯片厂家、传感器厂商、电子和通信供应商、整车厂家、平台开发运用商和内容提供商。其中,传感器技术(摄像头、雷达)、芯片与算法是其中的核心关键。

ADAS产业链
车载摄像头主要有前视(安装在前挡风玻璃上)、侧视、后视摄像头,其中前视摄像头是ADAS使用频率最高的摄像头,以完成PCW、LDW、TSR等功能。车载雷达主要分为超声波雷达、毫米波雷达和激光雷达,主要用于探测距离速度,是实现ACC、AEB等功能的核心部件。由于激光雷达成本较高,目前用于ADAS的主要是毫米波雷达,主要工作频率是24Ghz和77Ghz。77Ghz毫米波雷达是发展趋势,掌握在以博士为代表的少数供应商手中。
ADAS是基于传感器融合计算处理能力的提升以及底层控制技术的集成而发展的,在传感器技术方面,多传感器融合是未来发展趋势,而在自动驾驶上,视觉传感器与毫米波雷达的数据融合也变得十分重要。
视觉传感器与毫米波雷达数据融合策略
在智能驾驶场景下,摄像头与毫米波雷达的数据融合大致有3种策略:图像级、目标级和信号级。首先是图像级融合,图像级融合是以视觉为主体,将雷达输出的整体信息进行图像特征转化,然后与视觉系统的图像输出进行融合。其次是目标级融合,目标级融合是对视觉和雷达输出进行综合可信度加权,配合精度标定信息进行自适应的搜索匹配后融合输出。最后是信号级融合,信号级融合是对视觉和雷达传感器ECU传出的数据源进行融合。其中,信号级别的融合数据损失最小,可靠性最高,但需要大量的运算。
将摄像头和毫米雷达进行融合,相互配合共同构成汽车的感知系统,取长补短,实现更稳定可靠的ADAS功能。
多传感器融合的基本原理
多传感器融合的基本原理类似于人类大脑对环境信息的综合处理过程。人类对外界环境的感知是通过将眼睛、耳朵、鼻子和四肢等感官(各种传感器)所探测的信息传输至大脑(信息融合中心),并与先验知识(数据库)进行综合,以便对其周围的环境和正在发生的事件做出快速准确地评估。多传感器融合的体系结构分为分布式、集中式和混合式。
分布式多传感器融合。先对各个独立传感器所获得的原始数据进行局部处理,然后再将结果送入信息融合中心进行智能优化组合来获得最终的结果。分布式多传感器对通信带宽的需求低,计算速度快,可靠性和延续性好,但跟踪的精度却远没有集中式多传感器高。
集中式多传感器融合。集中式多传感器将各传感器获得的原始数据直接送至信息融合中心进行融合处理,可以实现实时融合。优点是数据处理的精度高,算法灵活;缺点是对处理器的要求高,可靠性较低,数据量大,故难于实现。
混合式多传感器融合。混合式多传感器信息融合框架中,部分传感器采用集中式融合方式,剩余的传感器采用分布式融合方式。混合式融合框架具有较强的适应能力,兼顾了集中式融合和分布式的优点,稳定性强。混合式融合方式的结构比前两种融合方式的结构复杂,这样就加大了通信和计算上的代价。