力觉传感器可提高机器人与外界配合、协作的效率
传感器对于机器人的作用,相当于感官神经的存在。如果将外部传感器按功能分类,可以分为触觉传感器、力觉传感器、距离传感器等。
力觉,是指对机器人的指、肢和关节等运动中所受力的感知。力觉传感器,顾名思义就是与力量有关的传感器,是用来检测机器人自身力与外部环境之间相互作用力的传感器。
这种力觉传感器,可用于控制机器人手所产生的力,在进行费力的工作中以及限制性作业、协调作业等方面是有效的,特别是在镶嵌类型的装配工作中,是一种特别重要的传感器。

力觉传感器在机器人中的应用
力觉传感器在机器人中的应用
一般情况下,力觉传感器的敏感元件是半导体应变片,常装于弹性结构的被检测处,如机器人关节处。力觉传感器的运作,就是通过这个安装在关节处的敏感元件。
力觉传感器检测弹性体变形程度,来间接测量或直接运算,来获取多维力、检测力和力矩,借以感知机器人指、腕和关节等在工作和运动中所受到的力,然后再根据这些力,决定机器人应该如何运动,如应采取什么姿态,以及推测对象物体的重量等。
力觉传感器能帮助机器人进行目标定位。一些人通常认为,机器人零部件定位和定量的唯一方法是使用视觉传感器。但实际上这不是唯一的解决方案。不可否认,视觉系统是零部件定位或量化的好方式,但采用力觉传感器来寻找和检测零部件也是可行的。确定他们在X-Y平面上的位置是一回事,确定他们所处的高度又是另一回事。实际上,要做到这一点,需要一套3D视觉系统。如果是一堆物体,你不需要知道整堆物体的确切树良,只需要每次去那堆物体里找就可以了。机器人只需确定那堆物体的高度,然后不断调整其抓取高度就可以了。
力觉传感器也能设定机器人的重复能力。如果你正在考虑使用机器人做装配任务,希望机器人能够一遍又一遍重复同样的任务。然而,装配任务很难实现自动化的原因之一,需要操作员进行力检测。通过引入FT传感器,或许可以感受到装配过程中施加的外力。

力觉传感器进行称重
根据重量的不同,力觉传感器传感器可以将不同重量的东西区分开来并且进行称重。在现实生活中,知道你的抓手里是否有正确的物体,或物体是否已经掉落,是非常有帮助的,它在你的生产流程中可以真正帮到你。力觉传感器可以很容易地实现这一点。
力觉传感器也能对机器人进行手动引导。大部分协作机器人都是通过使用内置FT传感器来实现手动引导的,但传统的工业机器人并没有内置这种类型的传感器。这就是为什么你的传统工业机器人需要一个FT传感器。有了它,你就可以手动引导示教机器人,而不需要使用示教器。只要一个FT传感器,就可以通过设定机器人的起点和终点,以及中间的线性轨迹,完成机器人的示教。
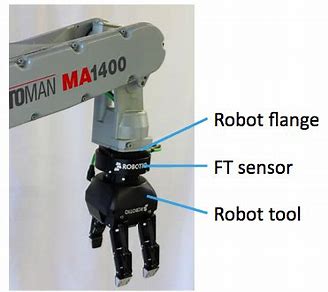
FT传感器
力觉传感器的分类
按照利用应变片和不同的机械结构,可构成适合可作业范围内的不同种类的力觉传感器。根据检测位置、被测对象、检测方式的不同,力觉传感器有以下分类:
按照检测位置的不同,力觉传感器可分为腕力觉、关节力觉和支座力觉等。
根据被测对象的负载,可以把力传感器分为测力传感器(单轴力传感器)、力矩表(单轴力矩传感器)、手指传感器(检测机器人手指作用力的超小型单轴力传感器)和六轴力觉传感器。
根据检测方式的不同,力觉传感器主要是以下几种方式:检测应变或应力的应变片式;利用压电效应的压电元件式;用位移计测量负载产生的位移的差动变压器、电容位移计式,其中应变片被机器人广泛采用。
在选用力传感器时,首先要特别注意额定值,其次在机器人通常的力控制中,力的精度意义不大,重要的是分辨率。另外,在机器人上实际安装使用力觉传感器时,一定要事先检查操作区域,清除障碍物。
通过力觉传感器进行配套这对实验者的人身安全、对保证机器人及外围设备不受损害有重要意义。