中国研究团队在水面无人船避障路径规划领域取得新进展
路径规划指按照满足一定需求寻找一条从起点到终点无碰撞路径的策略,是水面无人船的核心功能模块和研究重点。良好的避障算法对保障航运安全,实现经济性和环保性具有重要意义。流体力学是海洋研究的基础,但在很长一段时间里,流体力学和控制科学是两个独立学科。近日,清华大学深圳国际研究生院任政儒及其合作者将二者结合起来,通过引入流体力学知识,克服现有基于流线的避障路径规划算法无法满足海事航运法规的问题。
假设有一个很大的扁平水槽,在其一侧打开水龙头(源)放水,另一侧设置一个排水口(汇),无论水中有何种障碍物,水流始终会从水龙头(源)流向排水口(汇)。基于流体力学的知识,可以计算出由一系列流线组成的整个流场,顺着某一条流线便可以绕过障碍物抵达排水口。受此启发,研究团队设计出基于流线的避障路径规划方法,路径的起始点和终点分别假设为源和汇,从而实现避障。
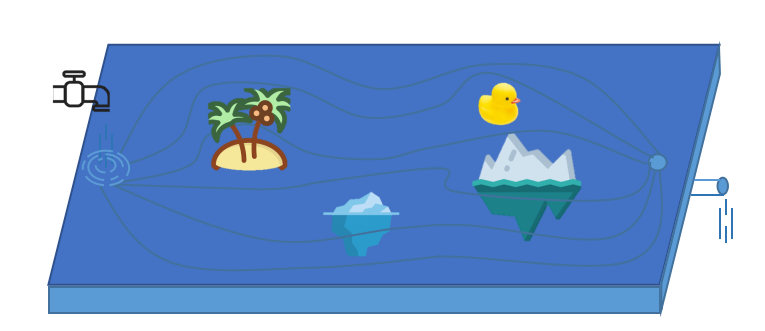
图1.基于流线的避障路径规划算法的原理图
与陆地机器人不同,水面无人船的避障需要遵守《国际海上避碰规则公约》,需要以特定方向绕行障碍物(例如其他船舶),而传统基于流线的避障路径规划算法难以满足绕行避障要求。本研究创新地引入涡流函数,改造基于传统方法生成的流场,使基于流线的避障路径规划算法可满足海事按规范要求方向绕行障碍物。对于生成的流场,研究团队选取最优绕行避障流线,离散化选取若干路径点,并利用贝塞尔曲线将路径点相连,实现最优避障绕行路径规划。
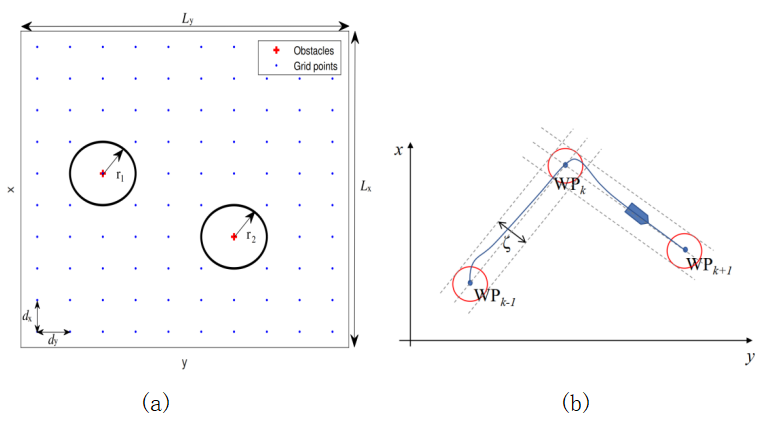
图2. 路径规划算法: (a)离散最优路径点选取,(b)根据路径点生成路径
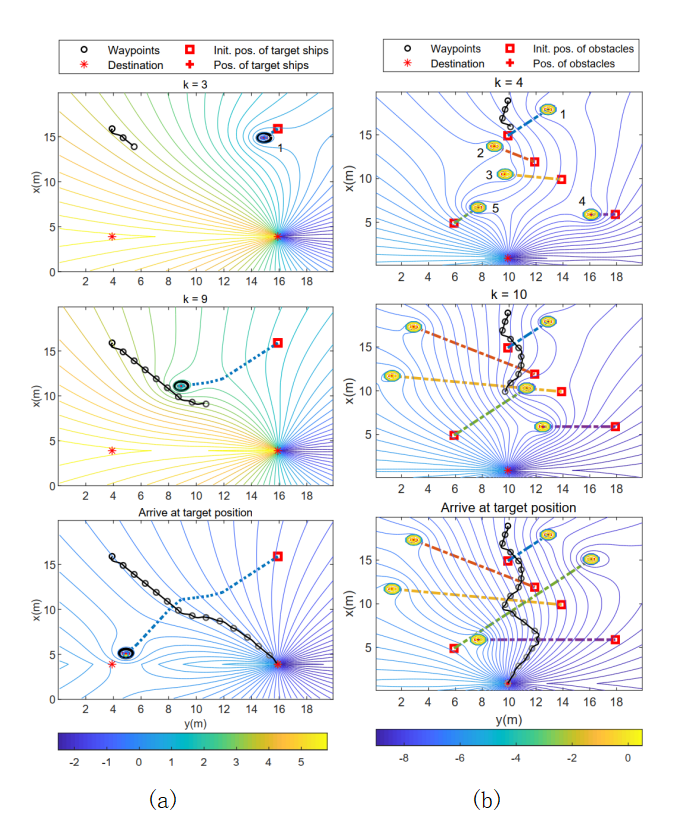
图3. 路径规划仿真验证:(a)满足《国际海上避碰规则公约》的避障,(b)多运动障碍物的复杂场景避障
相关研究成果以“基于涡流改进流函数的水面无人船避障制导算法”(A guidance and maneuvering control system design with anti-collision using stream functions with vortex flows for autonomous marine vessels)为题发表于《IEEE控制系统技术汇刊》(IEEE Transactions on Control Systems Technology)。
版权声明:除特殊说明外,本站所有文章均为 字节点击 原创内容,采用 BY-NC-SA 知识共享协议。原文链接:https://byteclicks.com/44726.html 转载时请以链接形式标明本文地址。转载本站内容不得用于任何商业目的。本站转载内容版权归原作者所有,文章内容仅代表作者独立观点,不代表字节点击立场。报道中出现的商标、图像版权及专利和其他版权所有的信息属于其合法持有人,只供传递信息之用,非商务用途。如有侵权,请联系 gavin@byteclicks.com。我们将协调给予处理。
赞